
发布日期:2016-12-14 访问次数:1690次
国有成均,在浙之滨;启真笃学,求是育英。浙江大学科技力量雄厚,科技成果众多,综合实力位居全国高校前列。长期以来,浙江大学坚持“顶天立地、天地互动”和“高水平、强辐射”的理念,主动服务浙江创新驱动发展战略,把科研成果“种”在浙江大地,转换为生产力,推动社会发展、创造社会财富。
在2016年中国浙江网上技术市场活动周上,浙大的“产学研”成果展示,让观众大开眼界。下面就由小编为您一一介绍。
1、盾构装备自主设计制造关键技术及产业化
获得奖项:2012年度获国家科学技术奖
完成人员:杨华勇,(洪开荣),(张闵庆),(韩亚丽),魏建华,(杨磊),(李建斌),龚国芳,(黄圣),谢海波,(张志国),刘振宇,(黄健),(陈馈),(应群伟)
完成单位:浙江大学,上海隧道工程股份有限公司,中铁隧道集团有限公司,中铁隧道装备制造有限公司,杭州锅炉集团股份有限公司。

盾构是国家地铁、公路、铁路、水利和国防等基本建设急需的重大装备,其关键技术难度高、附加值大, 反映了一个国家装备制造业的水平。项目围绕盾构掘进失稳、失效和失准三大难题,攻克了盾构自主设计制造关键技术,研发出土压、泥水和复合三大类盾构系列产品,形成了自主设计制造能力,实现了产业化。

主要创新成果包括:揭示了密封舱压力分布规律,发明了密封舱压力动态平衡控制方法,突破了多系统协调控制技术,研制了相应控制系统,提高了界面稳定性,解决了因界面失稳导致地面塌陷的难题;提出盾构载荷顺应性设计方法,据此研制出刀盘刀具、推进及驱动等子系统,使掘进中突变载荷对装备的冲击减少了30%以上,保护了关键部件,解决了因载荷突变导致系统失效的难题;提出基于盾构姿态预测的推进控制方法,可实时预测盾构位姿变化趋势,调整液压缸分区控制,发明了盾构推进压力/流量复合纠偏技术,研制出盾构推进系统,解决了因掘进方向失准造成盾构掘进偏离设计轴线的难题。

已授权发明专利77项,软件登记16项,制订国家及行业标准2项,发表SCI/EI 论文190篇,专著3部。项目成果孵化和支撑了上海隧道、中铁隧道和中铁装备国内自主设计制造盾构的三大龙头企业,盾构主要性能指标达到或超过国际同类产品,替代了进口,并出口新加坡、印度、马来西亚、泰国等国家。完成了北京、上海、广州、香港等26个国内外城市,300多个地铁、公路、铁路等各类隧道工程施工,取得了显著的经济和社会效益,推动了我国大型掘进装备制造业的科技进步,实现了盾构产业的跨越发展。
2、液压驱动外骨骼机器人
完成单位:浙江大学流体动力与机电系统国家重点实验室 浙江大学机械工程学院
完成人员:欧阳小平
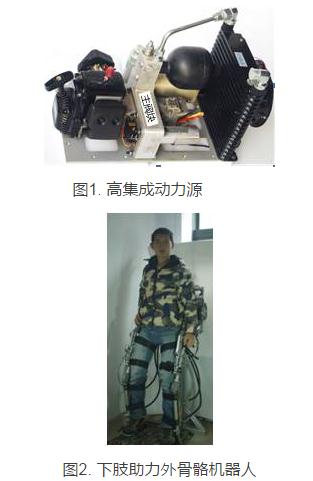
外骨骼机器人提高穿戴者的负重能力和运动能力,可以在战场、抢险救灾、野外施工及医疗康复等领域发挥重要作用。以高承载能力、高功率密度和长工作时间为研究目标,研发以发动机为原动机,液压驱动的下肢助力型外骨骼机器人,目标净负重≥50kg,行走速度≥5km/h,工作时间≥3h。主要工作进展有:
1)提出了发动机与液压系统的高效率匹配方案,研发了高集成、高功率密度的动力源,输出液压功率1.4kw,电功率100w,重量16.6kg;
2)开发了仿人下肢机构,关节运动范围满足人体行走、转体、蹲起、上楼梯等动作要求,并利用液压执行器将机器人髋关节及膝关节作为主动关节;
3)开发了低功耗集成控制器,实现了高效的多任务运行,控制器功耗≤5w,任务运行周期≤1ms,可扩展模块数≥8;
下肢助力外骨骼机器人样机已完成在辅助平衡条件下的自主负重行走测试,研究成果在Mechatronics等SCI期刊和国际会议上发表,授权发明专利3项。
3 家用吸尘机器人
完成单位:浙江大学玉泉校区教九浙江大学机器人研究中心
完成人员:朱世强
家用吸尘机器人项目作为服务机器人在家庭应用最大的一个领域,一直被IROBOT等公司所垄断。我们通过近二十年持续不断的研发,并与国内企业界进行产学研合作,实现了该产业技术突破。其中科沃斯已成为国内家用服务机器人产值最大的机器人企业,同时制定了国内国际相关的行业标准。

关键技术与原理
设计基于嵌入式系统的多任务高速实时控制器的软硬件系统。
基于卡尔曼滤波技术的多传感器融合的导航、定位技术,包括红外、超声、激光、视觉等。
研究多模态的人机交互系统:语音、视觉、触觉、移动互联网遥操作等等。
研究大批量定制的生产技术,确保家用吸尘机器人的可靠性、一致性、安全性。
4 固定翼无人机
完成单位:浙江大学数字农业与农村信息化研究中心
完成人员:何勇

关键技术与成果
装备了Limbach航空发动机和Micropilot自主飞行控制系统。拥有优秀的空气动力学特性和可靠的航空电器系统。机身长3.4m,翼展4.7m,巡航速度110km/h,实用升限3300m,最大航程300km。
搭载成像光谱相机、Lidar激光测距仪,热红外成像仪,三维成像仪,大幅面相机等传感器,实现高精度、多源多尺度遥感。
无人机遥感数据区别与卫星遥感的时效性和高精度,主要用于农田病虫害早期监测,农田土壤肥力和氮素分布,水稻估产等科学研究,相比卫星遥感,无人机遥感实施快速、周期短、空间分辨率高。
5、 多旋翼智能无人机
完成单位:浙江大学数字农业与农村信息化研究中心
完成人员:何勇

机身直径1.1米,高0.35米,使用最先进的锂离子聚合物电池,可挂载6KG设备或药物,飞行时间20-30分钟。
通过中央MCU的PID闭环控制实现前进、后退、左移、右移、自旋转等动作,使用卡曼滤波和I2C交流电机驱动器,攻克了飞行器在不同天气条件不同作业载荷下稳定飞行的技术难关,特别是喷洒作业时,所搭载的药量不断减少,同时飞行器要保持重心位置不变。此技术获得了4项专利,在国内外无人机植各行业中也属首创。
此飞行器用途广泛,还可用于田间实时图像管理、水稻育种授粉、病虫害检测等。

数学前沿交叉论坛暨浙江大学数学交...

浙江大学继续教育学院举行庆祝建校...

浙大党委书记任少波出席出席中国高...

浙江大学继续教育学院2025届国...

浙江省人工智能赋能教育创新与发展...

